回首頁
最新消息
News
最新消息
研習會
比賽訊息
優惠產品
公司簡介
About Us
產品介紹
Product
課程內容
Classes
技術分享
Source
技術分享
粉絲團
影片分享
檔案下載
Download
合作教室
Cooperation
聯絡我們
Contact Us
首頁
»
最新消息
» 雙足機器人的運動原理並製作
安東尼人形機器人初階班
阿邦的人形機器人奧義之書-地之章(結構篇)
阿邦的人形機器人奧義之書-海之章(動作編輯篇)
阿邦的人形機器人奧義之書-空之章(全自主篇)
3D列印
心得分享
仿生機器人
社會服務
獎狀與聘書
出版書籍
Arduino
研習課程
技術分享
Technology sharing
地之章-01節 馬達擺放
在設計人形機器人之前,首先,要先了解何謂人形機器人,人形機器人就如同人類一樣,要能搬運、舉手、雙腳走路等等動作…,機器人的大關節(如人的肩、髖關節等等…)大多是由”伺服馬達”組合而成,若是對應肘關節只有單一運動方向,那麼用一顆伺服馬達即可,以下介紹伺服馬達三種擺放位置:
馬達擺放位置1:
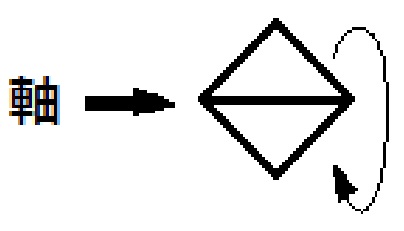
馬達擺放位置2:
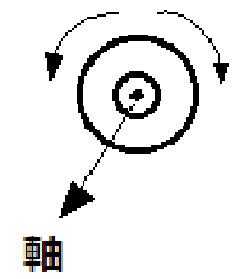
馬達擺放位置3:
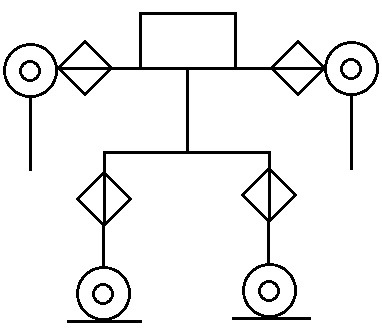
接著大家可以思考第一台人形機器人要長成甚麼樣子呢?以初學者來說,一開始控制人形機器人馬達數越少越好,若要讓一台人形機器人走起來,腳的部分需要幾顆馬達呢?我們可以從自然界的生物來探討,2足步行的生物中走起來最笨重的實屬企鵝,走來搖來晃去好可愛,不過他這樣走是有用意的可不是只想耍萌而已,企鵝走路時當它身體偏向一邊時這時是在做”轉移重心”的動作,對應到機器人馬達擺放位置是”3號”,接著企鵝以支撐重心的那隻腳順(逆)時針旋轉即可完成跨出左(右)腳的動作,對應到機器人馬達擺放位置是”2號”,所以,要讓一台人形機器人走起來,一隻腳最少兩顆馬達就可以了!若再加上手的部分我們可以繪出以下的馬達配置圖!
初階人形機器人馬達配置圖:
第一筆
上一筆
返回列表